
Все гирокомпасы класса «Standard» являются приборами с непосредственным управлением. Приведем общее определение таких гирокомпасов,
Гирокомпасами с непосредственным управлением называются такие приборы, чувствительный элемент которых представляет собой астатический гироскоп, механически жестко связанный с маятниковым устройством, которое управляет его движением с помощью момента силы тяжести, пропорционального углу отклонения главной оси гироскопа от плоскости горизонта.
Очень часто такие гирокомпасы ради простоты называются маятниковыми. Существует несколько способов технической реализации гирокомпаса с непосредственным управлением. Наиболее известный и широко распространенный из них состоит в жестком соединении астатического гироскопа с разбалансированной массой, придающий чувствительному элементу положительный маятниковый эффект, т.е. иначе говоря, нижнюю маятниковость.
На рис. 1.4 представлена модель такого гирокомпаса, состоящего из ротора 1 гироскопа, гирокамеры2, разбалансированной массы 3, горизонтального 4 и вертикального 5 колец карданного подвеса и направляющих опор вращения 6. Расстояние OG, на которое смещен вниз центр массы чувствительного элемента, называется метацентрической высотой «а».
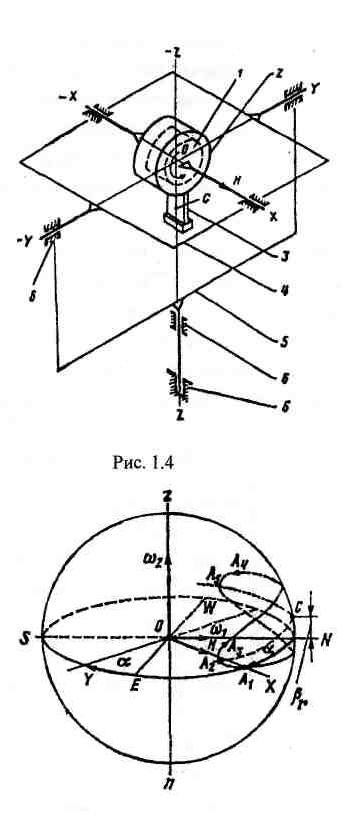
Рассмотрим поведение главной оси гирокомпаса, обладающего положительным маятниковым эффектом, по отношению к плоскости горизонта и меридиана. На рис. 1.5 показана горизонтная система координат ONEn, горизонтальная ω1 = ω×Cos φ и вертикальная ω2 = ω×Sin φ составляющие угловой скорости суточного вращения Земли.
Предположим, что первоначально главная ось гироскопа расположена горизонтально и отклонена от плоскости истинного меридиана к востоку на угол а α(позиция А1). Таким образом, при горизонтальном расположении оси ОХ гироскопа сила тяжести Р = Mgне создает момента относительно какой-либо его оси. Вращение плоскости горизонта со скоростью ω 1 вызывает непрерывное опускание восточной половины горизонта. В результате этого главная ось гироскопа видимым образом, т.е. по отношению к плоскости горизонта, поднимается. Указанный подъем происходит со скоростью, определяемой полезной составляющей
ωy= ω 1 × Sin α.
Как только главная ось гироскопа поднимется над плоскостью горизонта на некоторый угол (β возникает момент силы тяжести (рис. 1.6).
Ly= P×a×Sin β = M×g×a×Sinβ. Обозначив
M• g • a = B, (1.2)
гдеВ– модуль маятникового момента, окончательно получим
Ly = B×Sinφ. (1.3)
Под действием момента Lyвозникает прецессионное движение со скоростью
ω pz= Ly/ H, которое направлено в стороны совмещения оси ОХс плоскостью истинного меридиана. Однако существует некоторый начальный интервал времени, в котором угол β еще настолько мал (и, следовательно, еще настолько мал момент Ly), что в это время угловая скорость прецессии ω pz меньше угловой скорости ω2 вращения плоскости меридиана. В результате этого увеличивается угловое расстояние между осью ОХгироскопа и меридианом, т.е. ось ОХудаляется от него (участок траектории А1А2на рис. 1.5). Поскольку угол β увеличивается, при некотором его значении βr наступит момент, когда скорость прецессии гироскопа сравняется со скоростью вращения меридиана. На рис. 1.5 это положение перегиба траектории – точка А2. В последующем, например в позиции А3, значение угла β (рис. 1.7), постепенно нарастая, превысит значение βr (см. рис. 1.5). Следовательно, скорость ωpzпрецессии превысит скорость ω2 (позиция А3). В результате гироскоп неизбежно настигнет плоскость меридиана, но, имея при этом максимально возвышение, обгонит ее и окажется над западной половиной горизонта. Поскольку последняя непрерывно поднимается, ось ОХгироскопа начнет видимым образом опускаться (позиция А4), продолжая, тем не менее, прецессировать со скоростью, большей ω2, до тех пор, пока значение угла β не станет снова равным βг(позиция А5 ). В этот момент произойдет второй перегиб траектории.
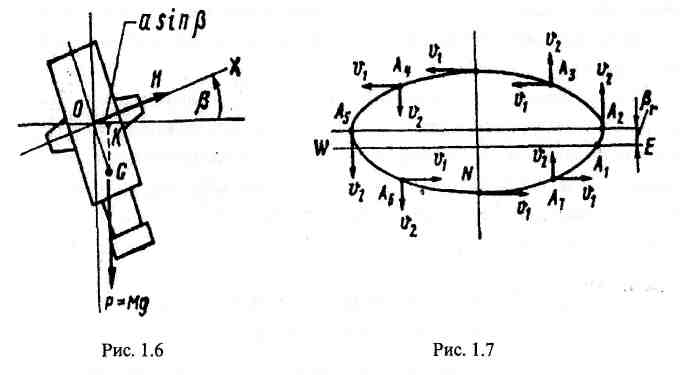
Вращение плоскости истинного меридиана со скоростью ω2 можно исключить из рассмотрения, если определять поведение главной оси гироскопа по отношению к плоскости, соединяющей точки перегиба А2– А5, т.е. приподнятой на угол βгнад истинным горизонтом. В этой постановке задачи удобнее всего определять движение конца главной оси гироскопа двумя линейными скоростями (см. рис. 1.7): V1– скоростью вызванной прецессионным движением под действием момента ВSin( β – βг), и V2– скоростью видимого движения по отношению к плоскости А2– А 5 ,которая вращается с той же скоростью ω1что и плоскость истинного горизонта. Равенство скоростей V1точек траектории, имеющих одинаковый угол
(β – βr), т.е. расположенных симметрично слева и справа относительно меридиана, а также равенство абсолютных значений при противоположном направлении скоростей V2у этих же точек доказывают симметричность восходящей и нисходящей ветвей траектории относительно линии А2 – A5и плоскости меридиана и, следовательно, замкнутость траектории, что соответствует незатухающим колебаниям.
Таким образом, гироскопический чувствительный элемент, обладающий положительным маятниковым эффектом, в принципе, становится гирокомпасом, так как он приобрел свойство избирательности по отношению к плоскости истинного меридиана, поскольку центр его колебаний располагается точно в плоскости истинного меридиана. Указанный центр в условиях неподвижного основания всегда может быть определен путем осреднения крайних отклонений оси гироскопа в азимуте.
Полное решение задачи реализации морского гирокомпаса требует погашения его незатухающих колебаний, т.е. демпфирования, чтобы в плоскости истинного меридиана располагалась не геометрическая точка (центр колебаний), а материальная ось гироскопа.


