
Для того, чтобы чувствительный элемент гирокомпаса стал пригодным для судовождения, т.е. для непрерывного определения курса судна, необходимо, чтобы его физическая ось ОХ стабильно располагалась в плоскости истинного меридиана. Это равнозначно требованию, чтобы указанная плоскость стала положением его статического равновесия, а не динамического, как в режиме незатухающих колебаний. Иначе говоря, должна выполняться следующая задача: главная ось чувствительного элемента, имея перед пуском гирокомпаса любое произвольное отклонение от плоскости истинного меридиана, спустя некоторое время должна прийти в эту плоскость и оставаться в ней (практически в ее малой окрестности) неограниченно долгое время. Чтобы обеспечить такое поведение чувствительного элемента, необходимо задемпфировать его колебания, т.е. сделать их из незатухающих затухающими. Из теории колебаний известно, что демпфирование можно реализовать с помощью момента, имеющего сдвиг по фазе на 90° по отношению к маятниковому моменту (принцип действия цистерн Фрама, применяющихся для снижения качки корабля на волнении).
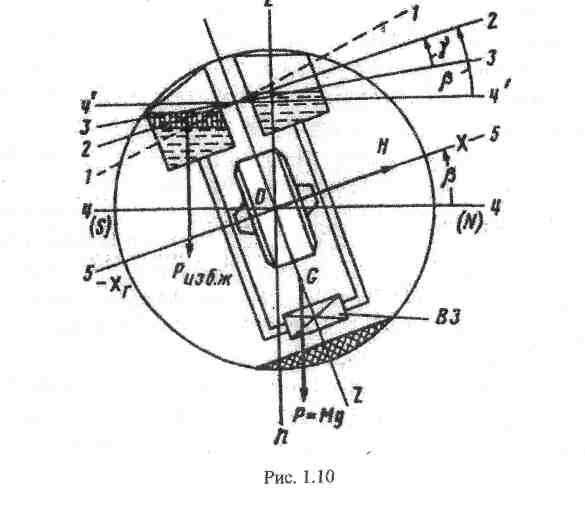
Техническим устройством, с помощью которого в гирокомпасах класса «Standard» создается дополнительный маятниковый момент, обладающий необходимым сдвигом по фазе по отношению к основному маятниковому моменту, является гидравлический маятник (система сообщающихся сосудов, заполненных жидкостью), который устанавливают внутри чувствительного элемента и жестко скрепляют с его оболочкой (рис. 1.10). На рис. 1.10 показана модель гидравлического успокоителя, снабженного трубкой для перетекания жидкости, а на рис. 2.8, позиция 4 – его фактическая конструктивная реализация, в которой кольцевые сосуды, разделенные переборками с отверстиями, располагаются вдоль оси Х-Х. При такой установке перетекание жидкости происходит в плоскости XOZ, а моменты от возникающего избытка жидкости создаются вокруг оси Y-Y.
Подбирая подходящую жидкость (весьма вязкое минеральное масло) и изготавливая отверстия с малой площадью рабочего сечения, можно добиться необходимой силы вязкого трения, связывающего жидкость с гиросферой, и, тем самым, обеспечить требуемое запаздывание в колебаниях жидкости по отношению к колебаниям гиросферы по углу β. Следует особо подчеркнуть, что при данном способе демпфирования колебаний сохраняется непосредственное управление движением чувствительного элемента, осуществляемое силой тяжести, действующей как на твердый, так и на гидравлический маятники.


